
Movement around Corners#
This notebook can be directly downloaded here to run it locally.
In the following we’ll investigate the movement of pedestrians around corners. When pedestrians walk around corners they are expected to slow down and take a path that is close to the corner. According to RiMEA Test 6 [1] a scenario is configured where 20 agents move towards a corner at which they should turn to the left.
Let’s begin by importing the required packages for our simulation:
Setting up the Geometry#
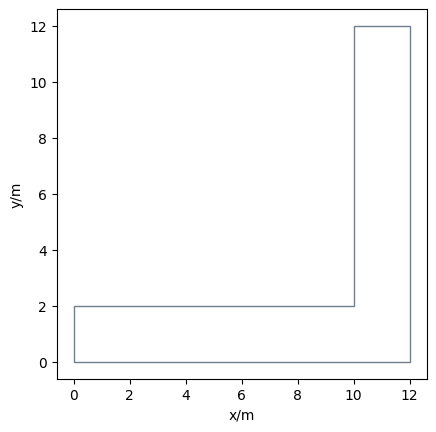
According to the RiMEA Test we define a corridor with a width of 2 meters and a corner on halfway:
Definition of Start Positions and Exit#
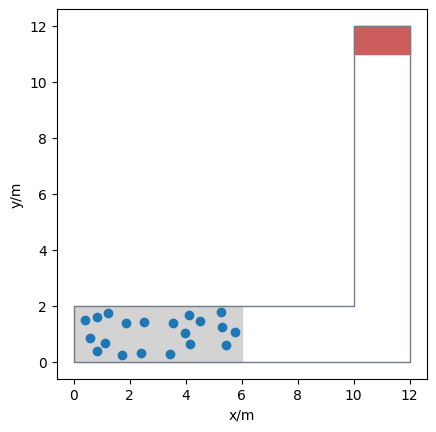
Now we’ll calculate the position of 20 agents in the lower left part of the geometry within an rectangle of 6 x 2 meters. For this purpose, we use a library function from JuPedSim that calclulates positions in a given polygon. We assume an agent size of 0.4 m (diameter) and set the distance parameters accordingly. The exit is defined in the upper right of the geometry.
spawning_area = Polygon([(0, 0), (6, 0), (6, 2), (0, 2)])
num_agents = 20
pos_in_spawning_area = jps.distributions.distribute_by_number(
polygon=spawning_area,
number_of_agents=num_agents,
distance_to_agents=0.4,
distance_to_polygon=0.2,
seed=1,
)
exit_area = Polygon([(10, 11), (12, 11), (12, 12), (10, 12)])
Let’s have a look at the basic simulation setup. The spawning area is shown in grey, the agents in blue and the exit area in red:
plot_simulation_configuration(
walkable_area, spawning_area, pos_in_spawning_area, exit_area
)
Setting up the Simulation and Routing Details#
As a next step we create a simulation object, set the configuration for the operational model (collision-free speed model) and define the routes for the agents. Default values for the model parameters are set implicitly. For this scenario, only one journey is created as all agents should follow the same route.
trajectory_file = "corner.sqlite" # output file
simulation = jps.Simulation(
model=jps.CollisionFreeSpeedModel(),
geometry=area,
trajectory_writer=jps.SqliteTrajectoryWriter(
output_file=pathlib.Path(trajectory_file)
),
)
exit_id = simulation.add_exit_stage(exit_area.exterior.coords[:-1])
journey = jps.JourneyDescription([exit_id])
journey_id = simulation.add_journey(journey)
Agent Parameters and Executing the Simulation#
As a next step we define the agent parameters and add them to the simulation. They share the same journey and model parameters except for the starting position and free movement speed which is normally distributed. After adding the agents, the simulation is started and iterates until all agents have reached the exit.
v_distribution = normal(1.34, 0.05, num_agents)
for pos, v0 in zip(pos_in_spawning_area, v_distribution):
simulation.add_agent(
jps.CollisionFreeSpeedModelAgentParameters(
journey_id=journey_id,
stage_id=exit_id,
position=pos,
desired_speed=v0,
)
)
while simulation.agent_count() > 0:
simulation.iterate()
simulation._writer.close()
Visualizing the Trajectories#
As expected the agents choose the shortest path and approach the corner in a funnel-shaped formation. Agents moving closer to the corner become slower than agents at the edge of the crowd who choose a longer path around the corner.
Download#
This notebook can be directly downloaded here to run it locally.
References & Further Exploration#
[1] RiMEA, ‘Guideline for Microscopic Evacuation Analysis’(2016), URL: https://rimea.de/
Another RiMEA test regarding the movement in bottlenecks can be found here.
This examples shows the basic behaviour of agents when moving around corners. A more advanced simulation and analysis can be found here.
The demonstration employed a straightforward journey with a singular exit. For a more intricate journey featuring multiple intermediate stops and waiting zones, see the upcoming section.