
Simulating Single-File Movement#
This notebook can be directly downloaded here to run it locally.
Pedestrian dynamics often focuses on the relationship between two key variables: density and either flow or velocity. The relationship is often visualized in what’s termed as the fundamental diagram. By quantifying the capacity of pedestrian facilities, it serves as an essential tool for evaluating escape routes in emergencies and determining the effectiveness of various pedestrian movement models when depicting pedestrian streams.
A fundamental question arises: how does one investigate the intricacies of the fundamental diagram without the interference of external factors?
Single-file movement presents the simplest possible system in pedestrian dynamics. It is envisioned as the unidirectional motion of individuals moving along a straight line, thereby considerably reducing the degrees of freedom. In essence, by stripping down the system to this basic representation, it limits the external factors that might affect the outcomes. As a result, any observations or patterns detected can be attributed with higher confidence to the direct interplay between density and flow, providing a clearer understanding of the fundamental diagram.
In this tutorial, we’ll simulate with JuPedSim a simplified geometry with closed boundary conditions acording to Paetzke.

_, exterior = generate_oval_shape_points(
48, radius=1.65 + 0.4, start=(0, -0.4), threshold=0.2
)
_, interior = generate_oval_shape_points(
35, radius=1.65 - 0.4, start=(0, 0.4), threshold=0.2
)
walkable_area = pedpy.WalkableArea(
shapely.difference(Polygon(exterior), Polygon(interior))
)
def find_nearest_clockwise_waypoint(position, all_points, waypoints):
idx = all_points.index(position)
while True:
idx = (idx + 1) % len(all_points)
if all_points[idx] in waypoints:
return all_points[idx]
Scenario Overview#
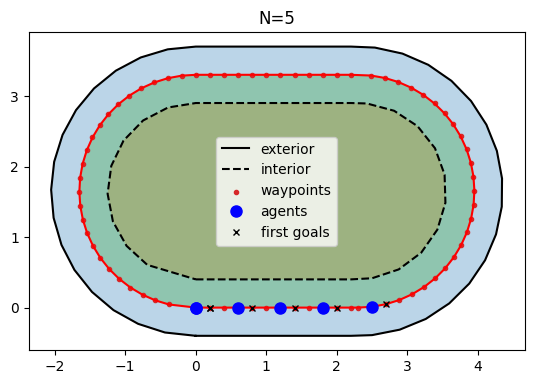
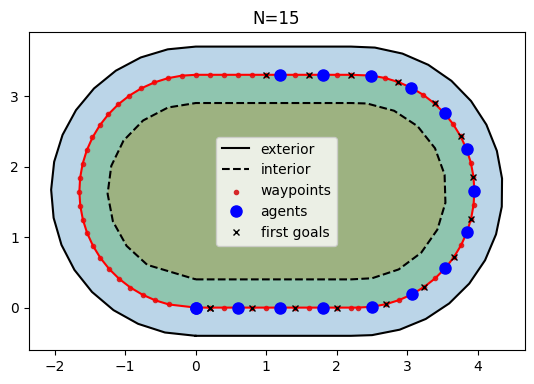
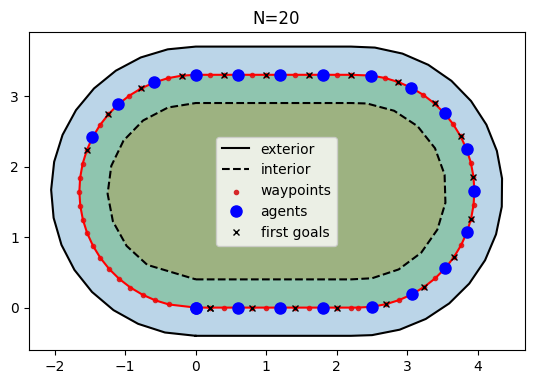
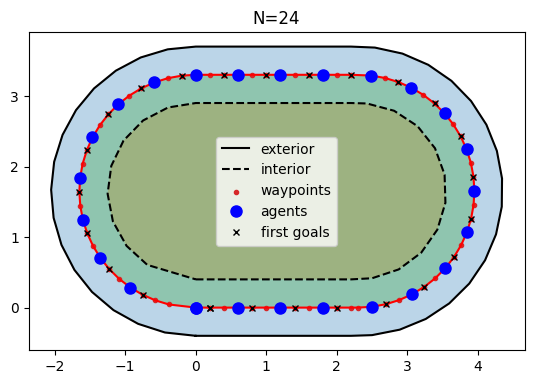
Let’s begin by positioning \(N\) agents along the central path within our specified geometry. This particular geometry presents an interesting challenge; though our goal is to simulate a movement akin to 1D, where agents traverse a straight line, the line here is bent.
We will set up the waypoints and agent positions based on the circuit illustrated by the dashed line in the preceding figure.
Each agent will be assigned its initial waypoint to aim for.
def distribute_agents_and_waypoints(total_agents: int):
all_waypoints, positions = generate_oval_shape_points(
num_points=total_agents
)
first_waypoints = []
for position in positions:
first_waypoints.append(
find_nearest_clockwise_waypoint(
position, all_waypoints, all_waypoints
)
)
return all_waypoints, first_waypoints, positions
Defining the Journey#
For our simulation, we’re aiming for movement within a closed system. To achieve this, we’ll establish a cyclical transition between waypoints, allowing agents to seamlessly move from one waypoint to the next. Given this structure, agents are confined within the system, eliminating the need for exit points.
While the starting orientation of our agents might not play a pivotal role, we’ll still configure it for precision. This means that, from the outset, each agent will be oriented towards its initially selected waypoint.
def init_waypoints(
simulation, all_waypoints: List[Tuple[float, float]]
) -> Dict[Tuple[float, float], id]:
waypoint_ids = []
waypoints: Dict[Tuple[float, float], id] = {}
distance = 0.1
for waypoint in all_waypoints:
wp_id = simulation.add_waypoint_stage(waypoint, distance)
waypoint_ids.append(wp_id)
waypoints[waypoint] = wp_id
return waypoints
def init_journey(
simulation: jps.Simulation, waypoints: Dict[Tuple[float, float], id]
) -> int:
waypoint_ids = list(waypoints.values())
journey = jps.JourneyDescription(waypoint_ids)
# create a circular transition from wp to next wp
for idx, waypoint in enumerate(waypoint_ids):
next_waypoint = (
waypoint_ids[0]
if idx == len(waypoint_ids) - 1
else waypoint_ids[idx + 1]
)
journey.set_transition_for_stage(
waypoint, jps.Transition.create_fixed_transition(next_waypoint)
)
journey_id = simulation.add_journey(journey)
return journey_id
def add_model_to_simulation(
simulation: jps.Simulation,
positions,
choosen_waypoints,
waypoints: Dict[Tuple[float, float], id],
journey_id: int,
) -> None:
agent_parameters = jps.CollisionFreeSpeedModelAgentParameters()
agent_parameters.journey_id = journey_id
for wp, new_pos in zip(choosen_waypoints, positions):
agent_parameters.position = new_pos
agent_parameters.stage_id = waypoints[wp]
simulation.add_agent(agent_parameters)
Executing the Simulation#
Now, we’ll proceed to run our simulation up to a predefined maximum iteration count. This approach lets the internal dynamics stabilize, potentially reaching a steady state. However, it’s worth noting that certain dynamics, like stop-and-go waves, might prevent the system from settling into such a state.
def run_simulation(total_agents: int, number_iterations: int = 2000):
(
all_waypoints,
first_waypoints,
positions,
) = distribute_agents_and_waypoints(total_agents)
plot_points_and_polygons(
all_waypoints, first_waypoints, exterior, interior, positions
)
trajectory_file = f"single-file-{total_agents}.sqlite"
simulation = jps.Simulation(
dt=0.05,
model=jps.CollisionFreeSpeedModel(
strength_neighbor_repulsion=2.6,
range_neighbor_repulsion=0.1,
range_geometry_repulsion=0.05,
),
geometry=exterior,
excluded_areas=interior,
trajectory_writer=jps.SqliteTrajectoryWriter(
output_file=pathlib.Path(trajectory_file),
),
)
waypoints = init_waypoints(simulation, all_waypoints)
journey_id = init_journey(simulation, waypoints)
add_model_to_simulation(
simulation, positions, first_waypoints, waypoints, journey_id
)
while simulation.iteration_count() < number_iterations:
simulation.iterate()
simulation._writer.close()
return trajectory_file
trajectory_files = [run_simulation(N) for N in [5, 15, 20, 24]]
from jupedsim.internal.notebook_utils import animate, read_sqlite_file
for trajectory_file in trajectory_files:
trajectories, walkable_area_sqlite = read_sqlite_file(trajectory_file)
animate(trajectories, walkable_area, every_nth_frame=5).show()
Discussion#
The behavior of agents closely following a central path can be attributed to the dense distribution of waypoints with a small radius. Essentially, the dense waypoints give agents minimal options for deviation, making them adhere closely to the specified path. This can be advantageous in scenarios where precise path-following is necessary.
However, the observed behavior of stop-and-go waves disappearing over time indicates an imperfection in the model, especially if such dynamics are expected or seen in real-world scenarios that the model aims to emulate. The fading of these waves suggests that the agents stabilize into a flow that doesn’t have the intermittent stop-and-go behavior.
Velocity-based models often have this limitation. In such models, agents typically adjust their velocities based on surrounding conditions. Once the initial disturbances (like starting from rest or initial congestions) are overcome, the agents find a sort of “equilibrium” velocity, leading to a smoother flow. This smooth flow may not always accurately represent real-world dynamics, especially in situations with frequent perturbations or inherent unpredictabilities, like human-driven traffic.
Summary#
The model effectively simulates agents that adhere closely to a central path due to the dense distribution of waypoints with small radii. However, the disappearance of stop-and-go waves over time highlights a limitation inherent to velocity-based models. Such models may not be suitable for scenarios where persistent stop-and-go dynamics are expected or required. Future iterations of the model may benefit from incorporating additional factors or behaviors to better simulate such dynamics.
Download#
This notebook can be directly downloaded here to run it locally.